This repository contains code for TTCDist: Fast Distance Estimation From an Active Monocular Camera Using Time-to-Contact by Levi Burner, Nitin J. Sanket, Cornelia Fermuller, and Yiannis Aloimonos.
You can find a pdf of the paper here.
We use standard scientific Python (>=3.8) libraries like NumPy, SciPy, Matplotlib, and Numba. Make sure these are installed.
The python bindings of the official apriltag library are needed to use the --april flag in any of the scripts below.
The Python package pyrealsense2 is needed to run the algorithms in realtime with a RealSense D435i camera. The following links may be helpful when tring to install pyrealsense2 on Ubuntu 22.04 and newer. Older versions of Ubuntu should use the standard instructions.
- https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
- https://github.com/IntelRealSense/librealsense/tree/master/wrappers/python
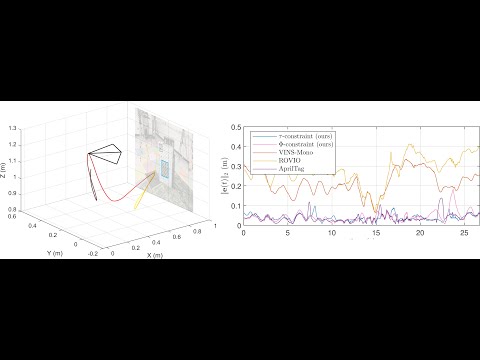
We provide the data for the 10 sequences considered in TTCDist here.
Download and extract to TTCDist/recordings_21_11_12
python3 ttc_depth_from_folder.py --dir recordings_21_11_12/record_000000 --visualizeNote: On the first run, the Numba functions will be compiled which will significantly affect the runtime. However, when run a second time, a compilation cache will be used instead.
python3 ttc_depth_from_folder.py --dir recordings_21_11_12/record_000000 --benchNote: On the first run, the Numba functions will be compiled which will significantly affect the runtime. However, when run a second time, a compilation cache will be used instead.
python3 ttc_depth_from_folder.py --dir recordings_21_11_12 --all --benchWe provide the data produced by all methods on the sequences in TTCDist here.
Download and extract to TTCDist/results
Then run the following to regenerate the results for the Tau, Phi, and AprilTag methods and calculate error.
python3 ttc_depth_from_folder.py --dir recordings_21_11_12 --all --save --april
python3 ttc_depth_calc_error.py --dir results --calc --latexTo use the --april flag the python bindings for the official apriltag package must be installed from here.
If you wish to reevaluate ROVIO and VINS-Mono on the recorded sequences the scripts in the ros/ folder may be
Assuming the pyrealsense2 package is installed just run the following
python3 ttc_depth_realsense.py --visualizeA live output will run and the Z distance between the camera and the object will be shown. The top number is from the Tau constraint and the bottom is from the Phi constraint.
The r key can be used to reset the patch being tracked. The q key will close the application.
If the python bindings for the official apriltag package are installed from here then the following will work
python3 ttc_depth_realsense.py --visualize --aprilin another terminal run
python3 ttc_depth_plot_live.pyA live plot will show. The top row shows the X, Y, and Z positions of the tracked object. x_hat is from the Tau Constraint. x_gt is from the AprilTag, and phi_x_hat is from the Phi Constraint.
Install the RoboMaster-SDK Python package. Make sure your RoboMaster robot works with some of the examples included in the SDK. Then to run the experiments from TTCDist use the command:
python3 ttc_depth_robomaster.py --visualize --b 2.0 --efferenceRemove the --efference flag to use measured acceleration as described in the paper.
Part of the rpg_trajectory_evaluation toolbox is reproduced in rpg_align_trajectory/ and is available under its respective license.